Mobile mapping dinámico
Cartografía precisa en movimiento
Escaneo y modelado de infraestructuras
El sistema de Mobile Mapping Dinámico integra diferentes sensores que, instalados sobre un vehículo en movimiento, permiten fotografiar y escanear con gran precisión el entorno. De este modo se obtienen imágenes panorámicas de 360º georreferenciadas junto con nubes de puntos en coordenadas absolutas, generando una representación completa y fiable del espacio recorrido.
Este sistema se utiliza para el mapeo en movimiento de carreteras, entornos urbanos, vías de ferrocarril y otras infraestructuras, incorporando:
- Captura de imágenes panorámicas: cámaras fotográficas que permiten una navegación visual similar a Google Street View.
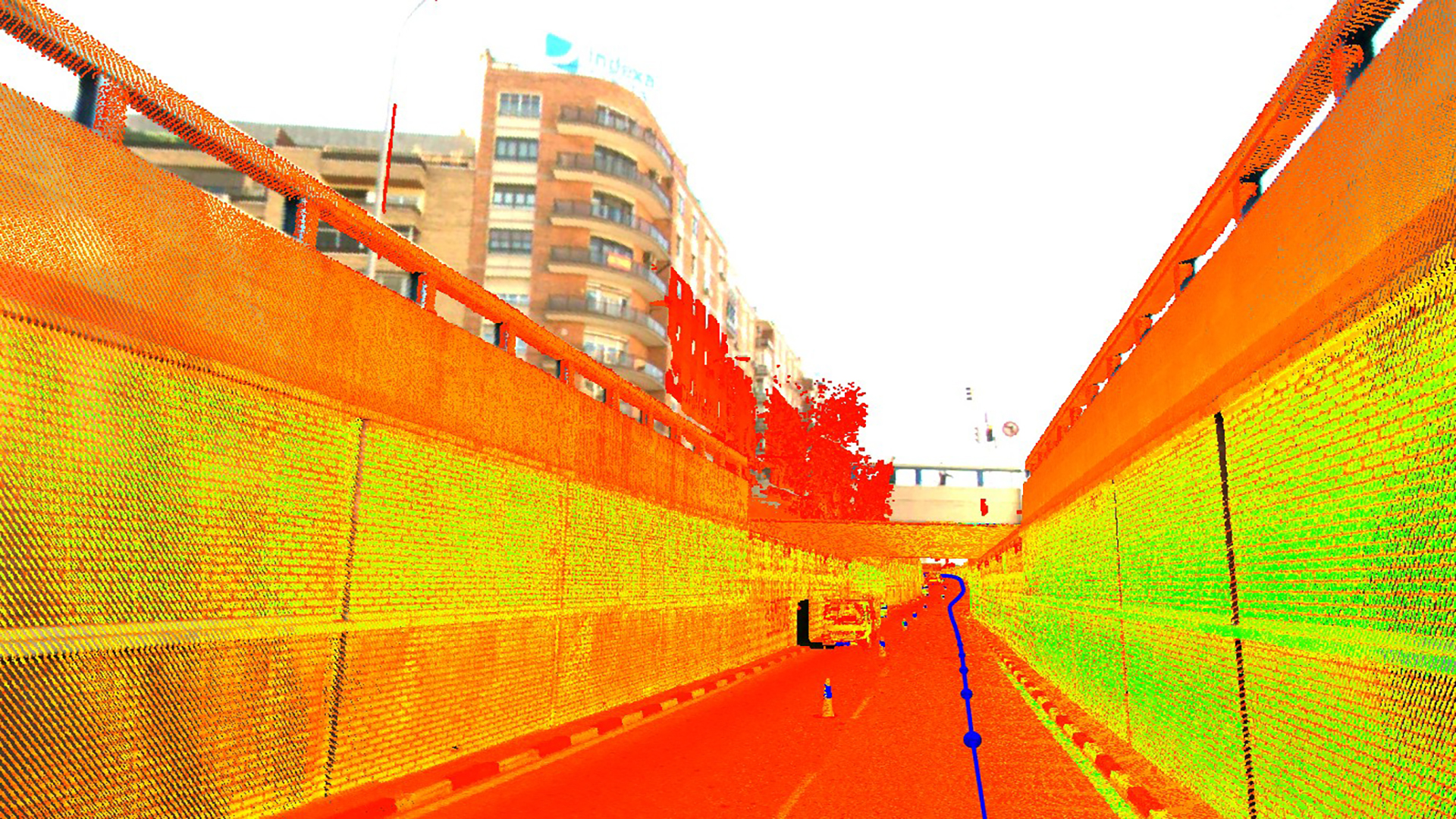
- Registro de datos LiDAR (láser escáner): geometría precisa de los objetos para facilitar mediciones fiables.
- Postprocesado de datos: tratamiento avanzado para optimizar resultados.
- Extracción de entidades a SIG: integración directa en sistemas de información geográfica.
Láser escáner
Los perfilómetros se encuentran en una posición inclinada para mejorar la definición de bordes en los objetos perpendiculares a la infraestructura y evitar sombras.
Sus principales características son:
- Hasta 4 millones de puntos por segundo
- Hasta 180 m de alcance
- 267 Hz de velocidad de rotación
- Precisión: 0,8 mm (blanco) · 1,2 mm (gris) · 2,7 mm (negro) a 50 m
Sensores de posicionamiento
El sistema de posicionamiento GPS combinado con la unidad inercial (IMU) permite conocer con exactitud la ubicación y trayectoria del vehículo, garantizando precisión centimétrica, incluso en condiciones de pérdida de señal.
Además, la calidad y precisión de los datos se supervisa en tiempo real durante la captura.
Set de cámaras
Formado por hasta 6 cámaras a color de alta resolución (1600 x 1200 px), dispuestas alrededor del vehículo para cubrir los 360º del entorno. Cada cámara está calibrada fotogramétricamente, lo que permite capturas precisas.
La frecuencia de las imágenes se adapta a la distancia recorrida por el vehículo, optimizando el volumen de datos y la personalización de cada toma.
Software
Software de captura y análisis de datos
Mobile mapping dinámico
Trabajo de campo
Durante la toma de datos, el software permite:
- Visualizar en tiempo real las imágenes capturadas por cada cámara.
- Ajustar parámetros como la frecuencia de captura de imágenes.
- Supervisar la trayectoria del vehículo sobre una cartografía precargada.
- Comprobar la calidad del posicionamiento GPS/IMU y detectar posibles pérdidas de señal.
- Verificar la transferencia y el guardado correcto de los datos en el disco duro.
Trabajo de oficina
Postprocesado de datos
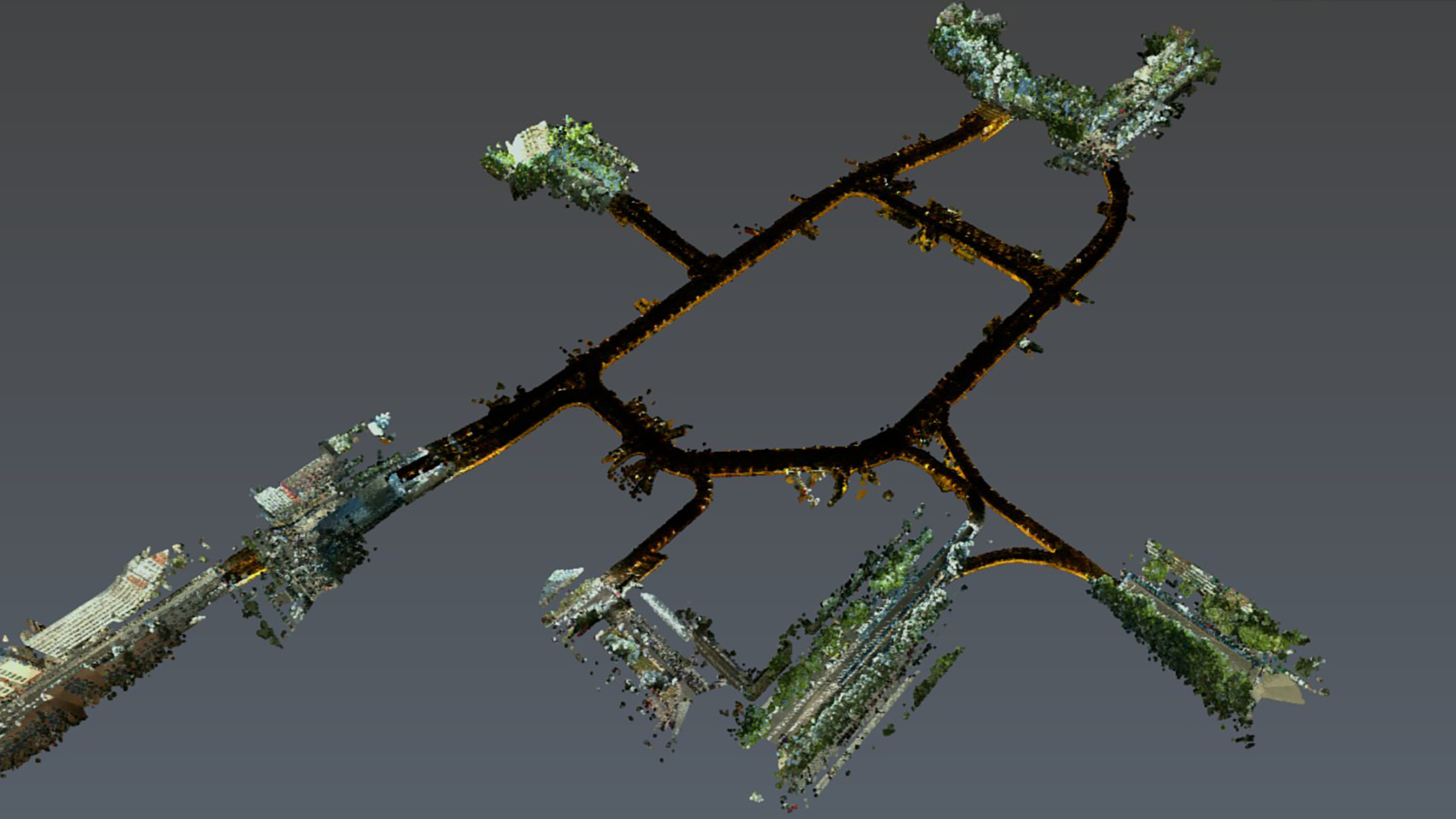
- Cálculo de la trayectoria mediante efemérides GPS y datos de la IMU.
- Georreferenciación de imágenes y asignación de color a la nube de puntos.
- Generación de modelos digitales completos a partir de la información bruta.
Extracción de entidades y análisis
- Integración en un Sistema de Información Geográfica (SIG) para organizar, analizar y representar datos georreferenciados.
- Uso de imágenes para navegación rápida y reconocimiento de objetos.
- Utilización de la nube de puntos para mediciones precisas y modo estereoscópico 3D.
- Digitalización de entidades en capas diferenciadas para un análisis estructurado.
Algoritmos avanzados
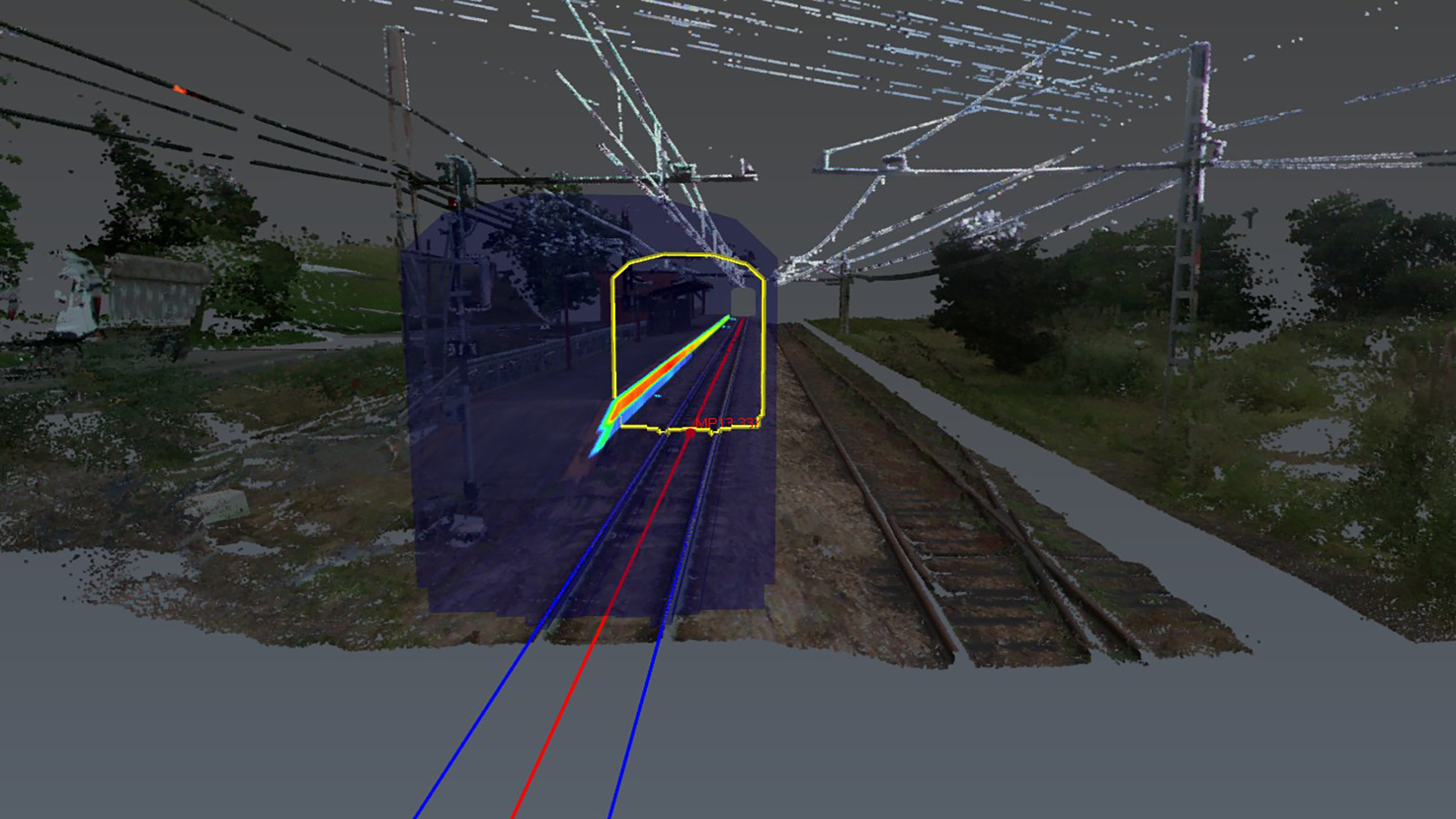
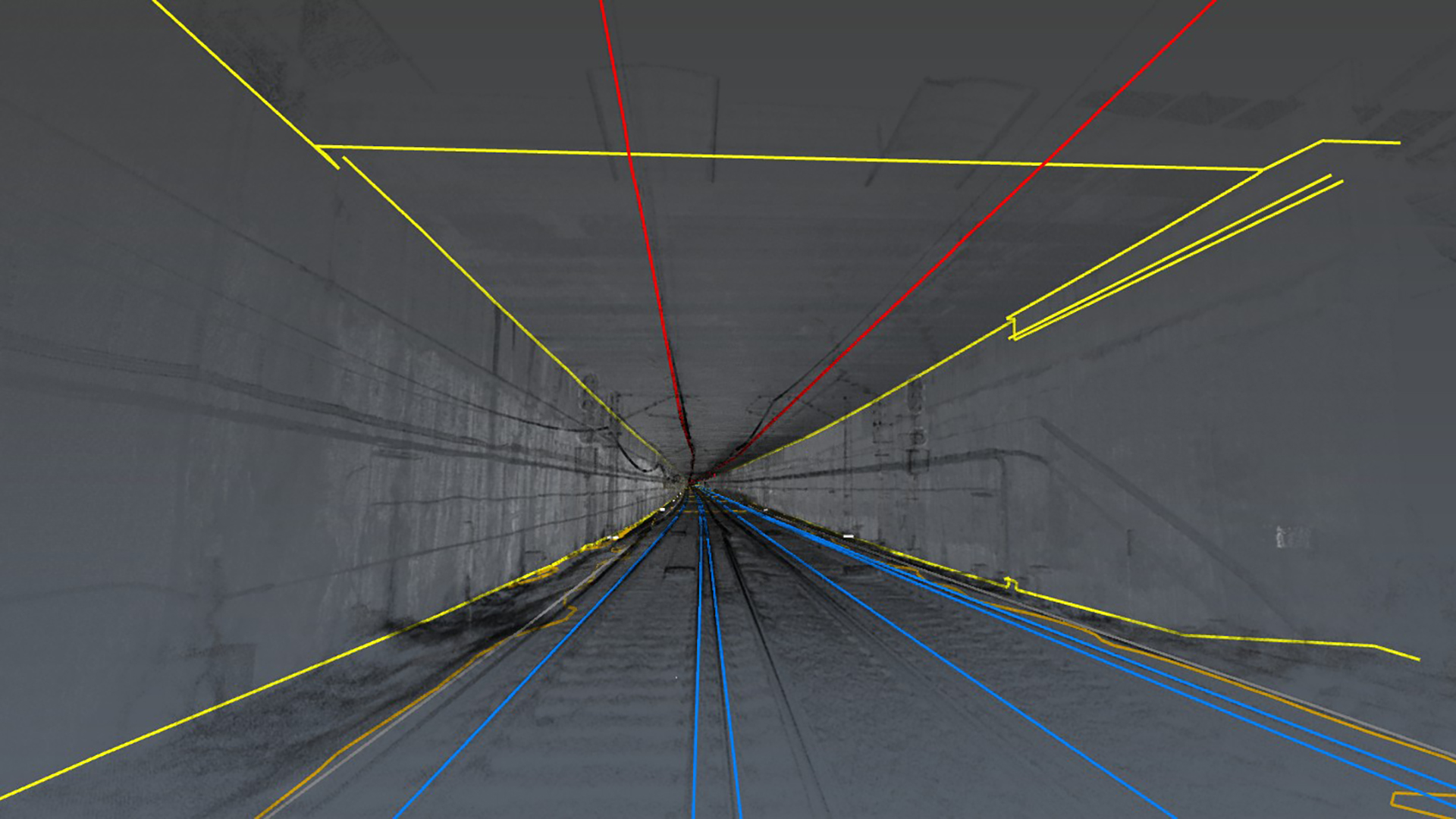
- Extracción automática de líneas y bordes en pavimentos e infraestructuras.
- Perfiles transversales de la infraestructura con medidas de pendiente, altura y longitud.
- Exportación de perfiles a formato CAD.
- Análisis de deformaciones del pavimento, comparando superficie real vs. teórica y mostrando desviaciones con escala de colores.